機器人焊接過程中, 焊槍與焊縫中心都會存在一定誤差, 而且焊接過程又是一個復雜、非線性、干擾因素較多的過程, 焊接工件熱變形、咬邊、錯邊, 以及焊縫間隙的變化等是不可預知的, 這些因素都會直接影響到焊接質量。
在“示教再現”或軌跡規劃應用的基礎上,實時焊縫糾偏可以進一步提高焊接精度, 尤其適用于輔助工程上焊接易變形、裝配復雜等自動焊難以控制的工件生產。
以鋁合金材3 mm 薄板的對接焊接為例,針對脈沖鎢極惰性氣體保護焊( GT AW) 焊接方法, 對平板直縫和平板法蘭進行焊縫跟蹤試驗, 將傳統的“示教再現”型機器人開發成具有實時焊縫跟蹤的弧焊機器人系統。
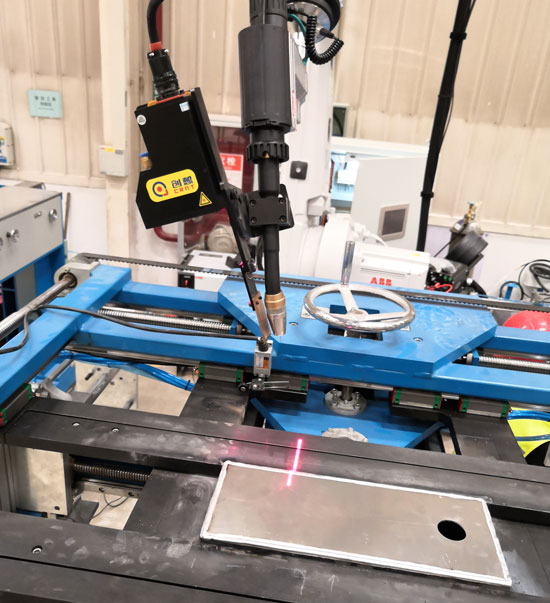
使用的是ABB焊接機器人+創想機器人焊縫跟蹤器。考慮到鋁合金薄板的焊接性, 采用交流脈沖焊進行焊接, 脈沖頻率為2 H z, 基值電流為50 A,峰值電流為125 A, 焊接速度為2. 6 mm/ s.
采用“小窗口”獲取焊縫特征信息, 在焊縫區域開了一個100 幀x120 幀的小窗口, 僅對此窗口內的圖像進行處理. 該窗口包含了進行焊縫跟蹤所需要的特征信息, 又削減了大量不必要的圖像信息. CCD 攝像機和送絲嘴都固定在焊槍上, 也就是焊槍、鎢極、送絲嘴在圖像平面投影的相對位置是不變的, 同時在試驗前已經將CCD 攝像機的軸心、焊槍軸心以及焊縫調節到了同一個平面上, 如此, 焊槍的軸線在圖像平面上的投影為一條水平線, 為后續的跟蹤提供了便利條件。
焊縫跟蹤器先提取到焊縫的上下邊緣, 經過去除偽點之后進行最小二乘法擬合, 得到焊縫中心線. 圖像處理算法流程主要包括圖像復原、中值濾波、邊緣尋找、偽點去除及最小二乘法擬合。
采用了逆濾波器方法來進行圖像復原, 同時選用3x3 模板中值濾波, 當前像素點的灰度值由它的8 鄰域的像素灰度值的中間值獲得。
在對圖像進行了觀察和分析后, 發現即焊縫邊緣和其他區域相比, 灰度變化極大. 因此, 根據灰度值變化的速率來確定焊縫邊緣點, 即每一列中速率變化最大的2 個點作為為焊縫的上下邊緣點. 用此種邊緣檢測算法是基于3 mm 薄板的特性, 沒有坡口使焊縫處較大的灰度變化在整幅圖像中極易捕捉, 同時此類算法較小的計算量也不會影響到圖像處理的實時性。
圖像處理算法所得到的焊縫位置與實際焊縫位置的誤差在 0.1 mm 以內,完全滿足實際焊接的需求。
創想機器人焊縫跟蹤器原理是, 固定激光視覺傳感器在焊槍正前方, 通過直接觀察焊槍與焊縫中心線的位置關系, 提取偏差信息, 輸出糾偏控制電壓。